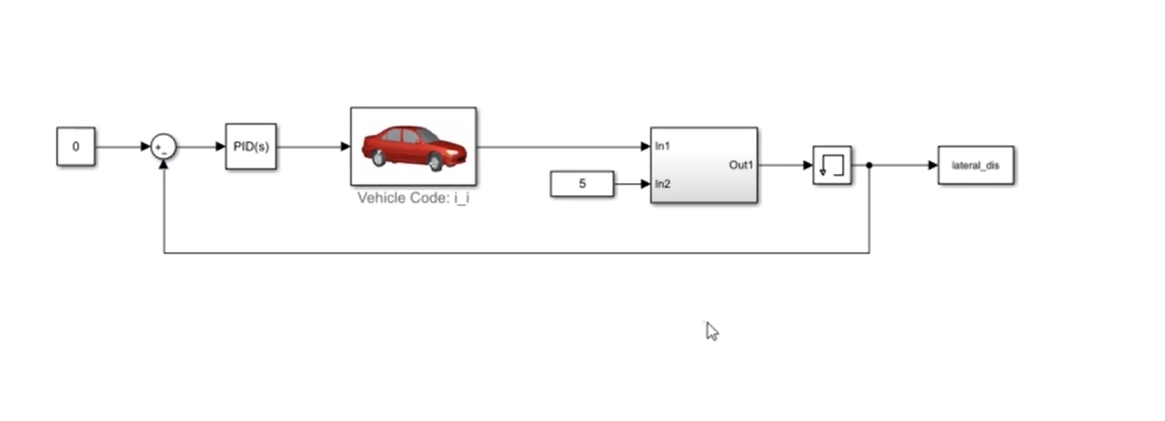
本次学习目的主要是 Carsim基本操作与Simulink的链接,并且复习一下PID
Konstruktion eines spurhaltenden PID-Reglers auf der Grundlage einer gemeinsamen Simulation mit MATLAB/Simulink und Carsim
PID原理介绍
Der PID-Controller (proportional-integral-derivative controller) besteht aus den Anteilen des P-Gliedes, des I-Gliedes und des D-Gliedes.
In dem Blockdiagramm sind die Reihenstruktur (Produktdarstellung) und die Parallelstruktur (Summendarstellung) der Übertragungsfunktionen des realen PID-Reglers dargestellt.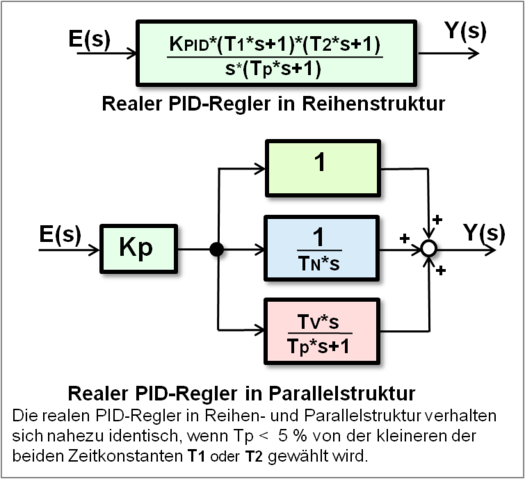

P-Parameter, um die Reaktionszeit des Systems zu beschleunigen. Eine zu große Anzahl kann das System jedoch instabil machen.
I-Parameter, der den Fehler des Systems im stationären Zustand verringert, aber die Zeit bis zum Erreichen des stationären Zustands verlängert.
D-Parameter, verbessert die Systemstabilität und reduziert das Überschwingen, ist aber empfindlich gegenüber weißem Rauschen.
干预:Interventionen
P-Regler接近目标值:Das Ergebnis wird sich dem Zielwert annähern, ihn aber nicht erreichen.
Es braucht also I-Regler.
误差,干扰:Störungen
风: das Wind
Der Wind nimmt 2 Grad der Temperatur ab.
Carsim 介绍
CarSim ist eine Simulationssoftware für die Fahrzeugdynamik.
车道保持方法介绍
Einführung in das Methoden der Fahrspurhaltung
1.Vorbesichtigungspunkte PID-Regelung
2.Fuzzy-Steuerung
3.PID-Regelung auf der Grundlage des neuronalen Netzes BP
预瞄点 Vorbesichtigungspunkte
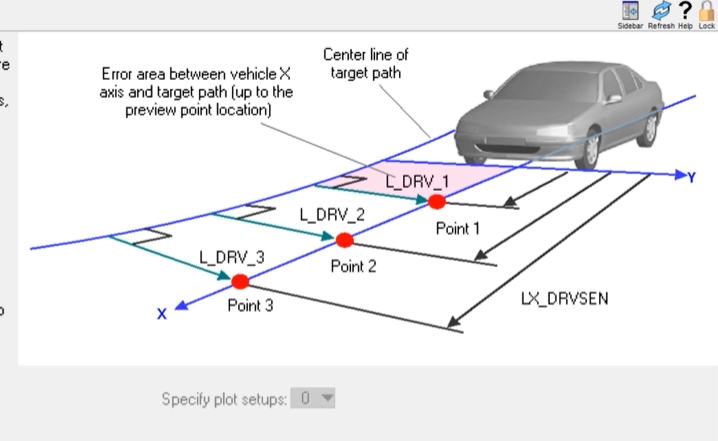
L_DRV_1 = $d_{la}$
seitliche Abstandskomponente.
Fahrervorschaupunkte Definition des seitlichen Abstands zwischen der Entwurfsfahrbahn und dem Fahrervorschaupunkt
输出 Ausgabe /die Abweichung des Vorschaupunktes von der Seitenlage
Der vertikale Abstand zwischen dem Vorausschaupunkt und dem Zielpfad ist nicht gleich der Abweichung der seitlichen Position des Vorausschaupunkts vom Pfad.
Also müssen wir diesen Abstand umrechnen.
$ \theta = \arcsin \frac{d_{la}}{5} $
$\bigtriangleup f = d_{la} {\div} \cos \theta $
Gewünschter Zustand
Gewünschter Zustand ist 0. Wir erwarten, dass die Fahrzeuge auf der mittleren Fahrspur bleiben.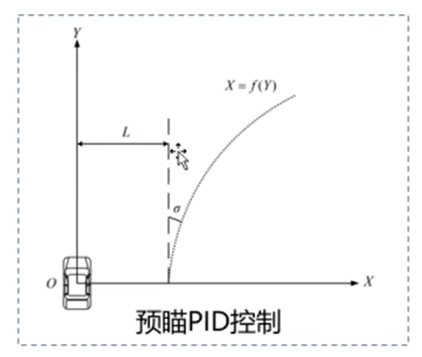
Je geringer die Abweichung des Vorschaupunktes von der Seitenlage, desto besser.
Der gewünschte Zustand ist also 0.
